create.01-1 ロボットカー
第一回は、ロボットカーの制作をしていきたいと思います。
難しく感じることもあるかもしれませんが、一緒にがんばりましょう。
必要なもの
●ROBOT CAR Kit(Smart V3.0) 購入元
●ナットドライバー(6㎜) ※あると便利です
●Arduino(ソフトウェア) ダウンロード
1.組み立て/調整
1-1 組み立て
キットにあらかじめ用意されているCDの手順に従って組み立てていきましょう!
※似たような部品がたくさんあるので間違えないようにしましょう。
※部品のゆるみがないか、再確認しましょう。
1-2 超音波センサの調整
電源スイッチを入れ、超音波センサが少し動いた後、正面を向いていない時があります。
悪い例

その際は、次の写真のように超音波センサをはずし、正面を向くように調整しましょう。
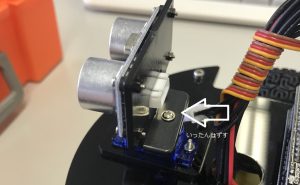

修正後

2.動作確認
2-1 必要ファイルのダウンロード
あらかじめArduinoのソフトが入っていることを確認した上で次のリンクからフォルダをダウンロードしてください。
圧縮されているので、解凍してから開いてください。
解凍手順について
・ダウンロードしたフォルダを右クリックする。
・すべて展開をクリック。
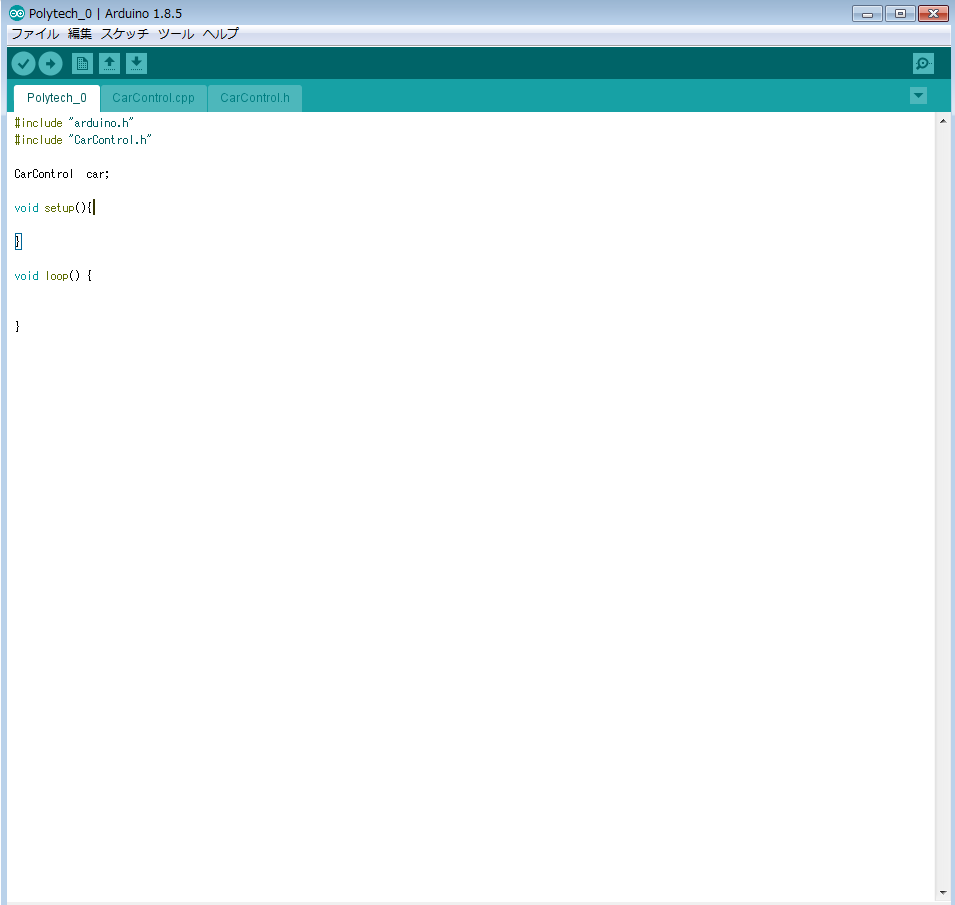
・Polytech_0.inoを開く。
次のような画面がでてきます。
2-2 プログラミング
それでは、プログラムをかいていきましょう!
まず、USBケーブル(付属品)を接続します。

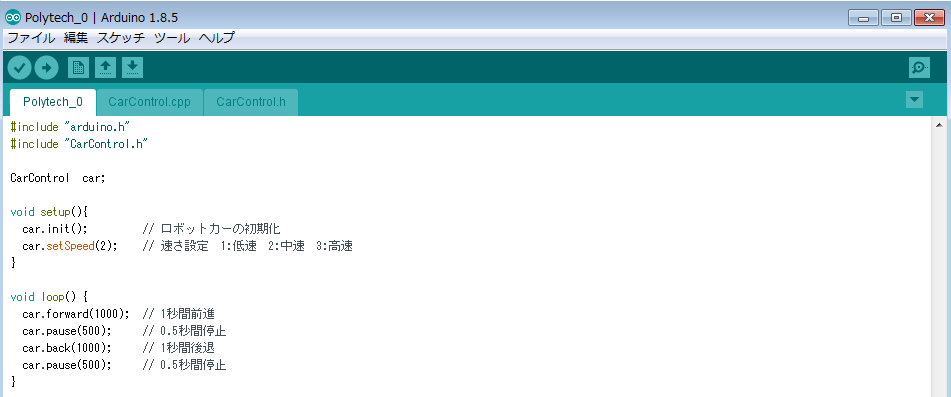
動作確認として、次に示す前進・後退のプログラムをかいてみましょう!
2-3 コンパイル、マイコンボードへの書き込みおよび動作確認
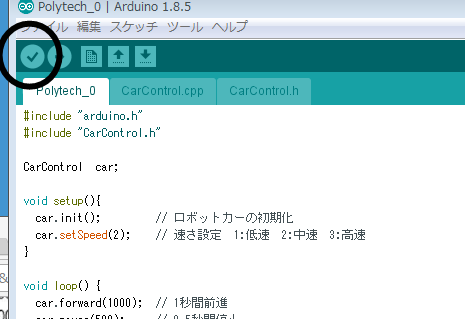
左上のチェックマークをクリックすることでコンパイル完了です!
※エラーが出た場合は、打ち間違えの可能性があります。今一度確認をしてください。
マイコンボードへ書き込んでいきます。
※注意事項
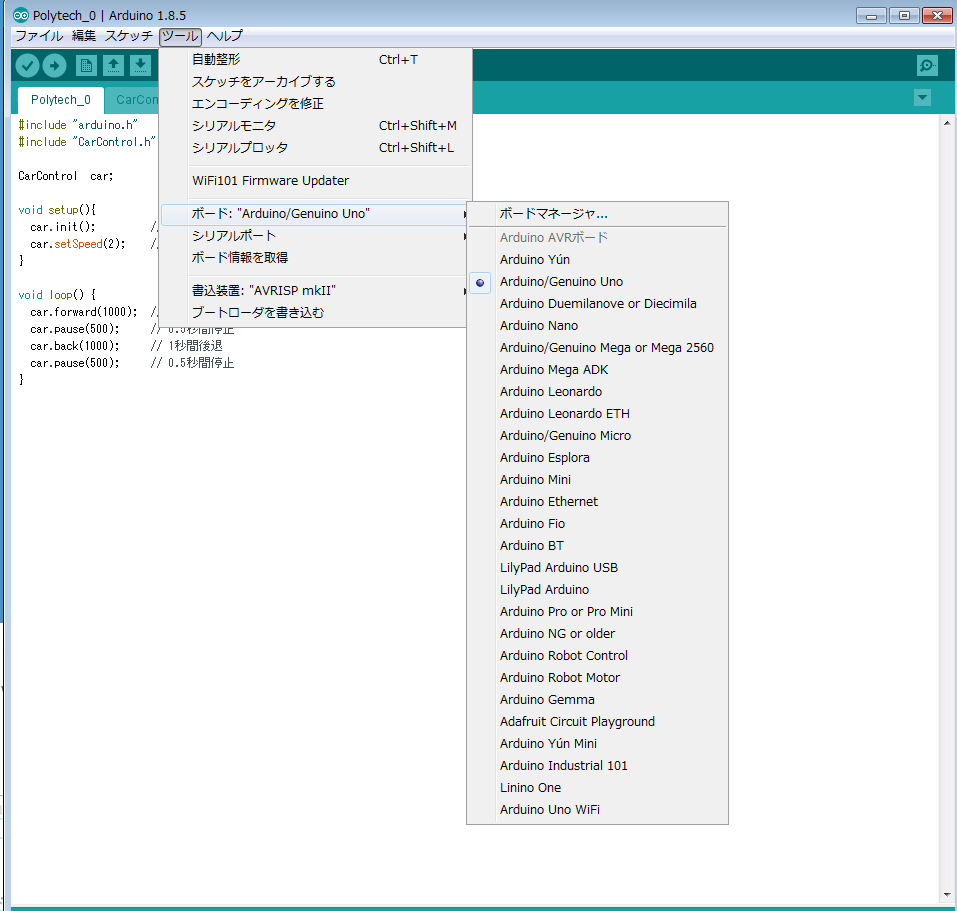
マイコンボードに書き込む際、ボードやシリアルポートが間違っていると、エラーが発生して書き込むことができません。
下の画像のようにツール→ボードから Arduino/GenuinoUno Uno を、
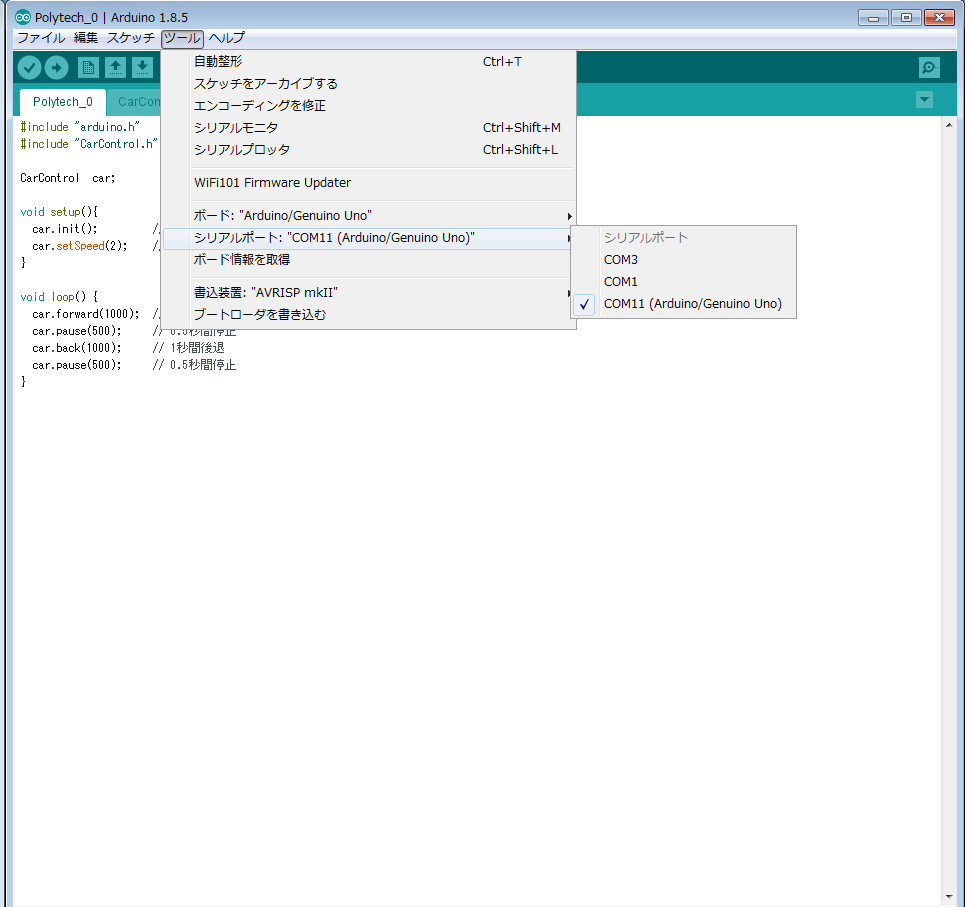
ツール→ボードから COMxx(Aruduino/Genuino Uno) 指定してください。(xxのところは物によって違っていることがあります)
電源スイッチを入れてみましょう!
1秒前に進み、1秒後ろに下がる動きを繰り返せば成功です!